|
|
||
|
Introduction This project's goal was to produce an implementation of Ambient Occlusion mapping which used graphics hardware to accelerate the occlusion calculation. Ambient Occlusion is a technique developed by ILM during the making of the Pearl Harbor movie to improve lighting without requiring full global illumination computations. The algorithm is able to give the effect of more complex lighting and shadowing computations without the computations. (Obviously it is not as correct as the more complex solutions, but at times this is sufficient.)
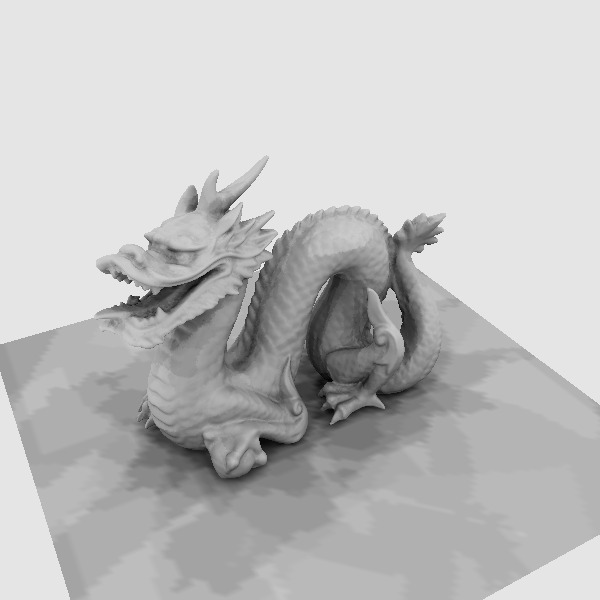
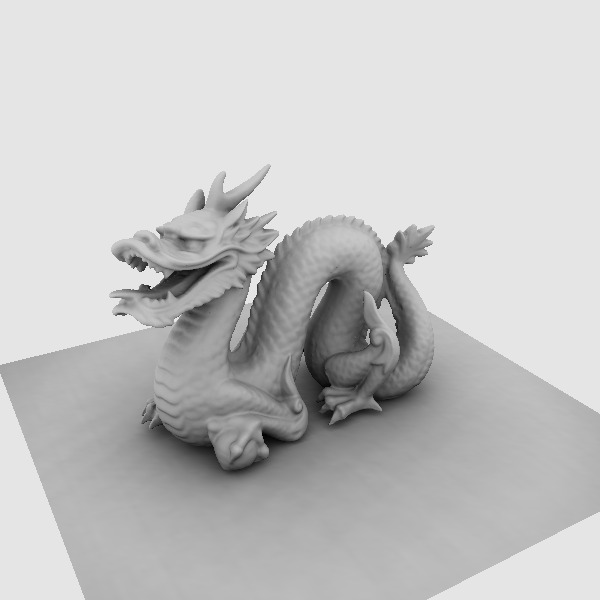
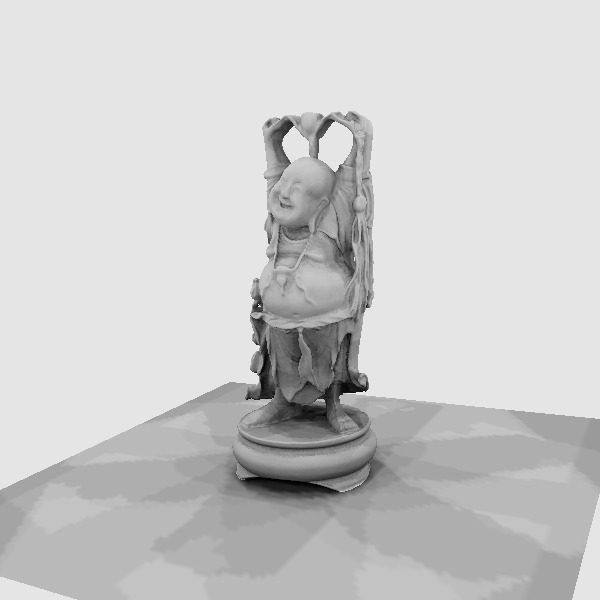
Ambient Occlusion Algorithm The images to the right render only the ambient occlusion term. There is no other lighting in the images.
|
|

|
|
Implementation The above algorithm is the general description of the algorithm but not the implementation that I chose to do. Instead, I chose to use the concept of "Depth-Map Ambient Occlusion". The reason for using the depth-map based ambient occlusion is that using hardware we are able to compute the ambient terms much quicker than the ray tracing algorithm.
Depth-Map Based Ambient Occlusion To generate viewpoints for this implementation, I chose to use a icosahedron, and subdivided it until it reach the number of vertices that were desired for the processing. This accounts for the strange number of viewpoints used for each of the images above. The image below shows the viewpoints around the model.
 From each of these viewpoints, the model was rendered into a depth map in the graphics board memory then the depth map was read back into system memory. Each vertex was projected into the depth map and its visibility was determined. If it was visible, the cosine weighting was computed and added into the ambient occlusion term. Once all the views are computed, the model can be rendered with the ambient occlusion term as its color information. Obviously this is not the final use for the term, it should be used as part of the final equation for lighting the surface. A bent normal can be computed to allow sampling environment maps to allow a nice complex ambient effect. (A bent normal is just the normal along the direction where the surface obtained most of its ambient light.) No matter what the final use, the model can be manipulated in real-time with this level of lighting information.
References
|
||
glenn@raudins.com